The contour plot of unknown non-convex cost function, and local optimal
5 (454) · $ 10.00 · In stock


The contour plot of unknown non-convex cost function, and local

DMPC generates two trajectories x j tt+N t (solid

Cody FLEMING, Professor (Associate), Doctor of Philosophy

Graph of the objective function w → f (w) in contour plot, evaluated in
Machine Learning: Gradient Descent, by Jacky Feng

PDF) DMPC: A Data-and Model-Driven Approach to Predictive Control

Optimization SpringerLink

Sensors, Free Full-Text
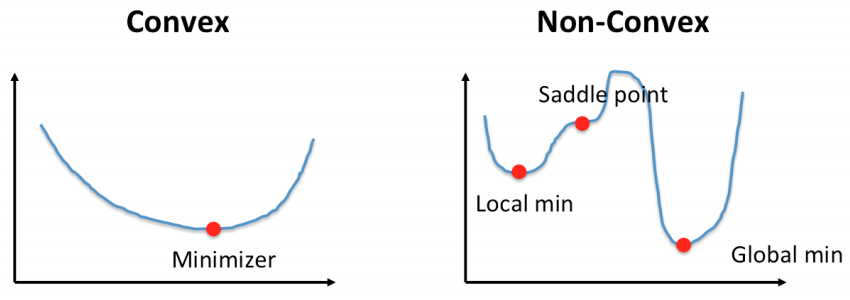
Navigating the Terrain: Convex vs. Non-Convex Functions in

Nonlinear programming - Wikipedia
You may also like