The powered simple walking model. (a) A hip spring is attached
4.7 (439) · $ 22.00 · In stock


Low-profile prosthetic foot stiffness category and size, and shoes affect axial and torsional stiffness and hysteresis - Frontiers

Ch. 4 - Simple Models of Walking and Running

Simulation model of a bipedal robot.

Joint relationship of height-adjusted SMI with gait speed, TUG, TCS and

Reducing the energy cost of walking with low assistance levels through optimized hip flexion assistance from a soft exosuit

The Best Carry-On Travel Backpacks for 2024

Hip Injuries in Gymnastics - A Complete Guide

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Fix Your Running Injuries Become Your Best Runner - The Sling Method
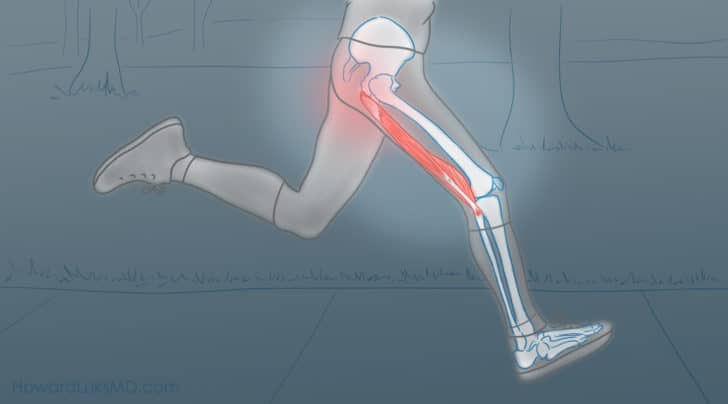
Proximal hamstring tendinopathy- a true pain in the butt

Snapshots of the simulated bipedal robot. (A) 0.5 m/s (B) 0.8 m/s (C)







