The final design constrains gripper travel using a pair of bearing
4.5 (517) · $ 14.00 · In stock

Download scientific diagram | The final design constrains gripper travel using a pair of bearing shafts. from publication: Axiomatic Design of a Linear Motion Robotic Claw with Interchangeable Grippers | Reykjavik University's electronic lab has a five-axis CRS Robotics A255 arm used in laboratory exercises that are in need of an improved claw. The current claw limits the robot arm operation duration and dexterity due to its bulk. In addition, the grippers don’t provide a | Axiomatic Design, Robotics and Physical Exercise | ResearchGate, the professional network for scientists.
the design of an underactuated wheelchair-mounted - UMass Lowell
image009.jpg
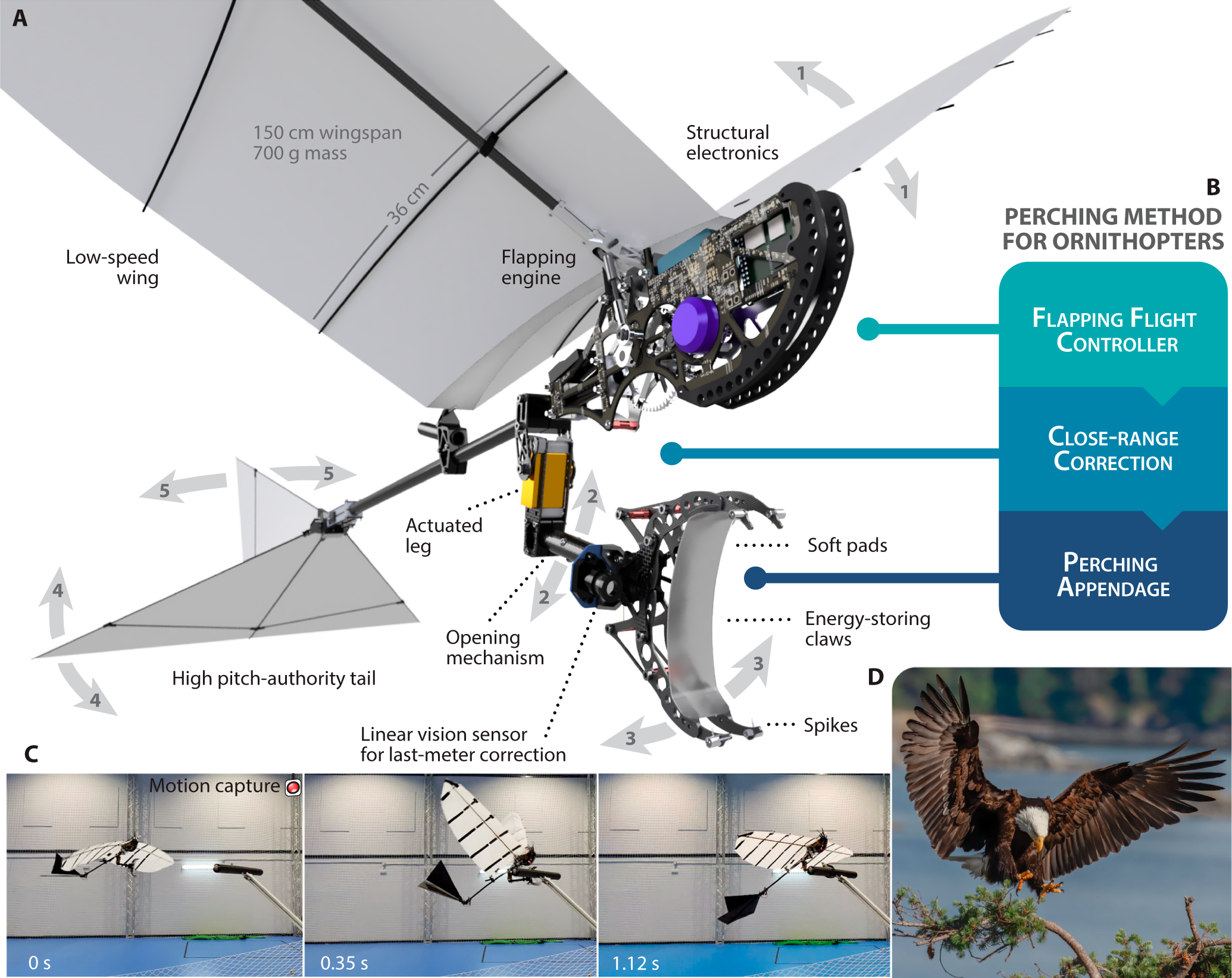
How ornithopters can perch autonomously on a branch
ComputerAided_Design_Engineering_amp_Manufactur.pdf

US11224497B2 - Surgical systems with multiple RFID tags - Google Patents

a) Design of the soft gripper; (B) actuation module; (c) gripper
Manual Viewer - Section - FRC Q&A

Maintenance robot for remote assembly of protective jackets on live gas risers - ScienceDirect

Sensor Fusion: Spatial Reasoning and Scene Interpretation, (1989), Publications

The final design constrains gripper travel using a pair of bearing

MR-Conditional Actuations: A Review

Robots and Robot Controllers

Design and Application of High Resolution and Multiobject







