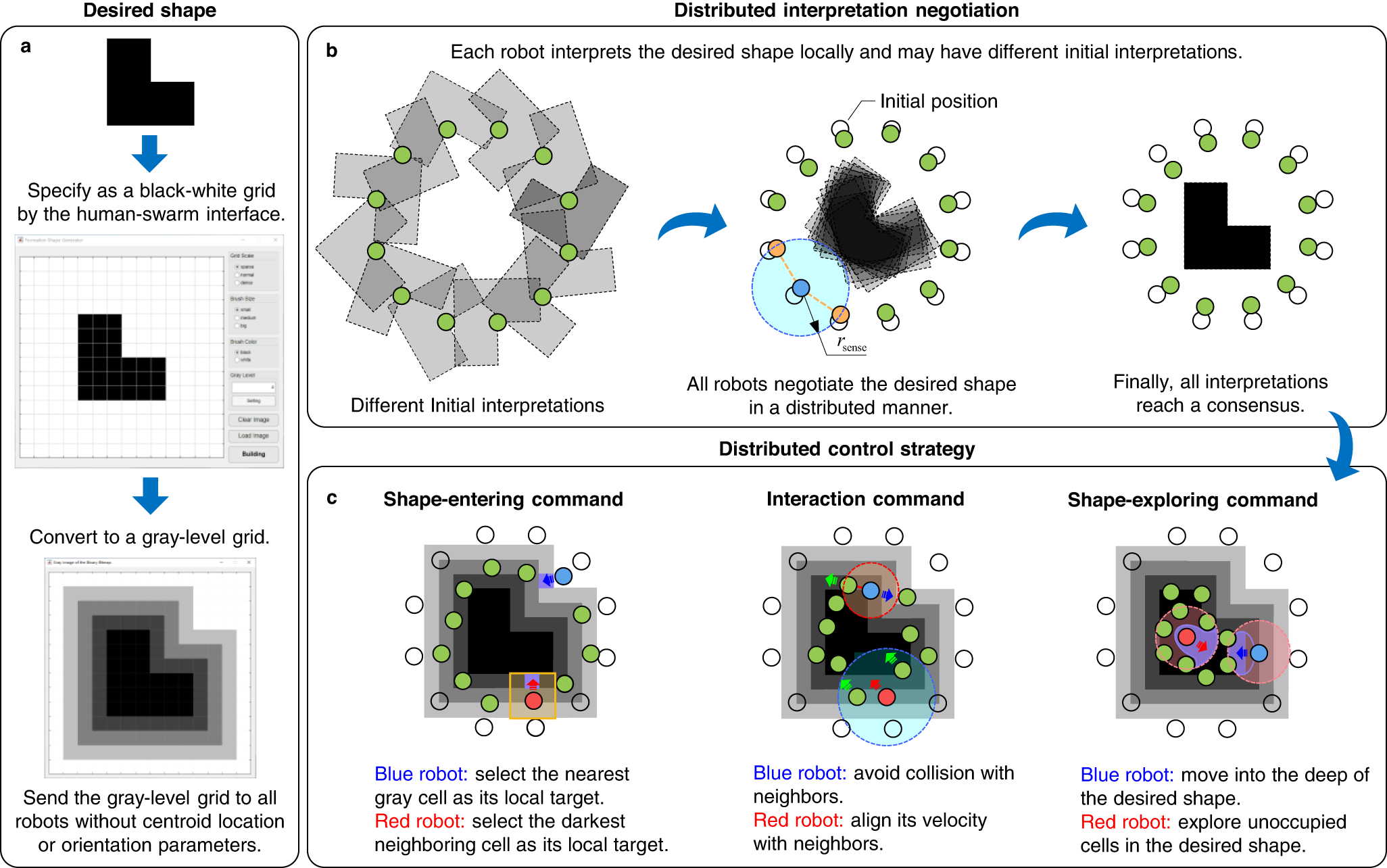
Mean-shift exploration in shape assembly of robot swarms
4.6 (201) · $ 18.00 · In stock

Robots In Space. Robots in space are the ultimate…, by Artificial Intelligence +
![PDF] Shape Formation in Homogeneous Swarms Using Local Task Swapping](https://d3i71xaburhd42.cloudfront.net/ef156664151c247b67c4baea2b8db8c61fa74209/11-Figure10-1.png)
PDF] Shape Formation in Homogeneous Swarms Using Local Task Swapping

Location Functions for Self-stabilizing Byzantine Tolerant Swarms
PDF) Mean-shift exploration in shape assembly of robot swarms

a) A potential function of the form given by Eq. (4) with k = 4. (b)

Roderich GROSS, Senior Lecturer, PhD, The University of Sheffield, Sheffield, Sheffield, Department of Automatic Control and Systems Engineering
![IJRR-2024] Novel Bearing-Angle Method Significantly Enhances the Visual Localization Observability.](https://i.ytimg.com/vi/EMQXMJ3_M9Y/maxresdefault.jpg)
IJRR-2024] Novel Bearing-Angle Method Significantly Enhances the Visual Localization Observability.
![IEEE-ICRA-2022] Robust Localization of Occluded Targets in Aerial Manipulation](https://i.ytimg.com/vi/QBwkKc8qZJM/maxresdefault.jpg)
IEEE-ICRA-2022] Robust Localization of Occluded Targets in Aerial Manipulation
新闻详情页
![PDF] Shape Formation in Homogeneous Swarms Using Local Task Swapping](https://d3i71xaburhd42.cloudfront.net/ef156664151c247b67c4baea2b8db8c61fa74209/12-Figure12-1.png)
PDF] Shape Formation in Homogeneous Swarms Using Local Task Swapping
Mean-shift Exploration Strategy Enhances the Efficiency of Robot Cooperation

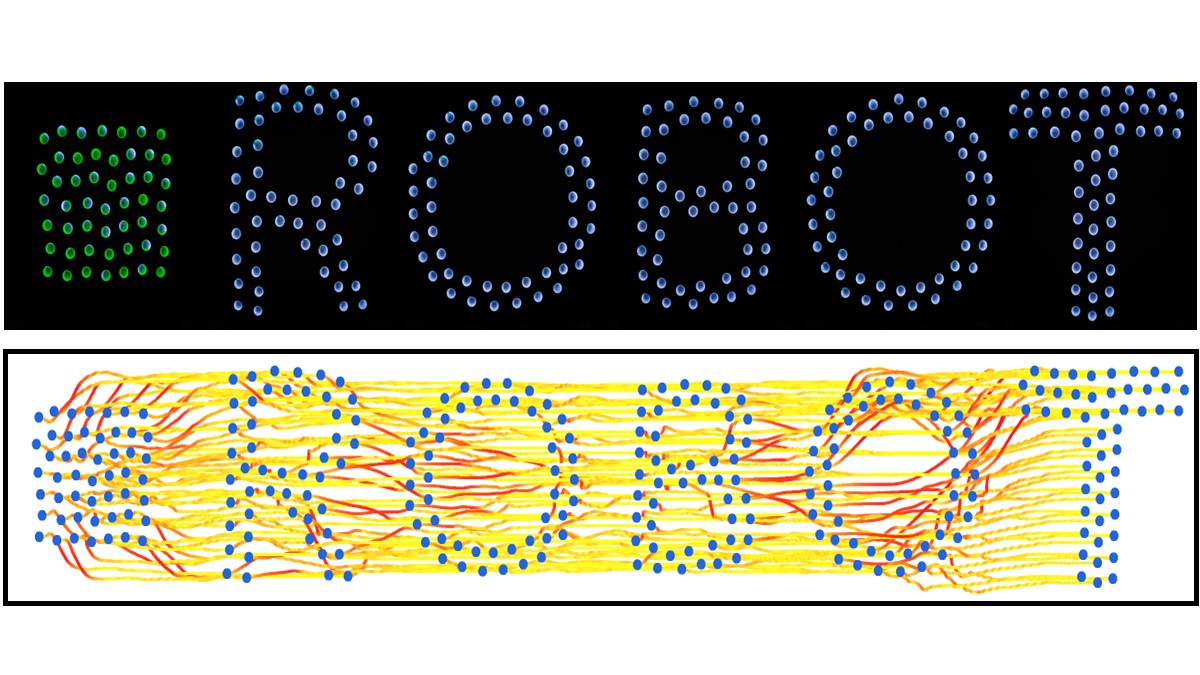
Pictures of different robot shapes used for our experiments, and their

Mean-shift exploration in shape assembly of robot swarms