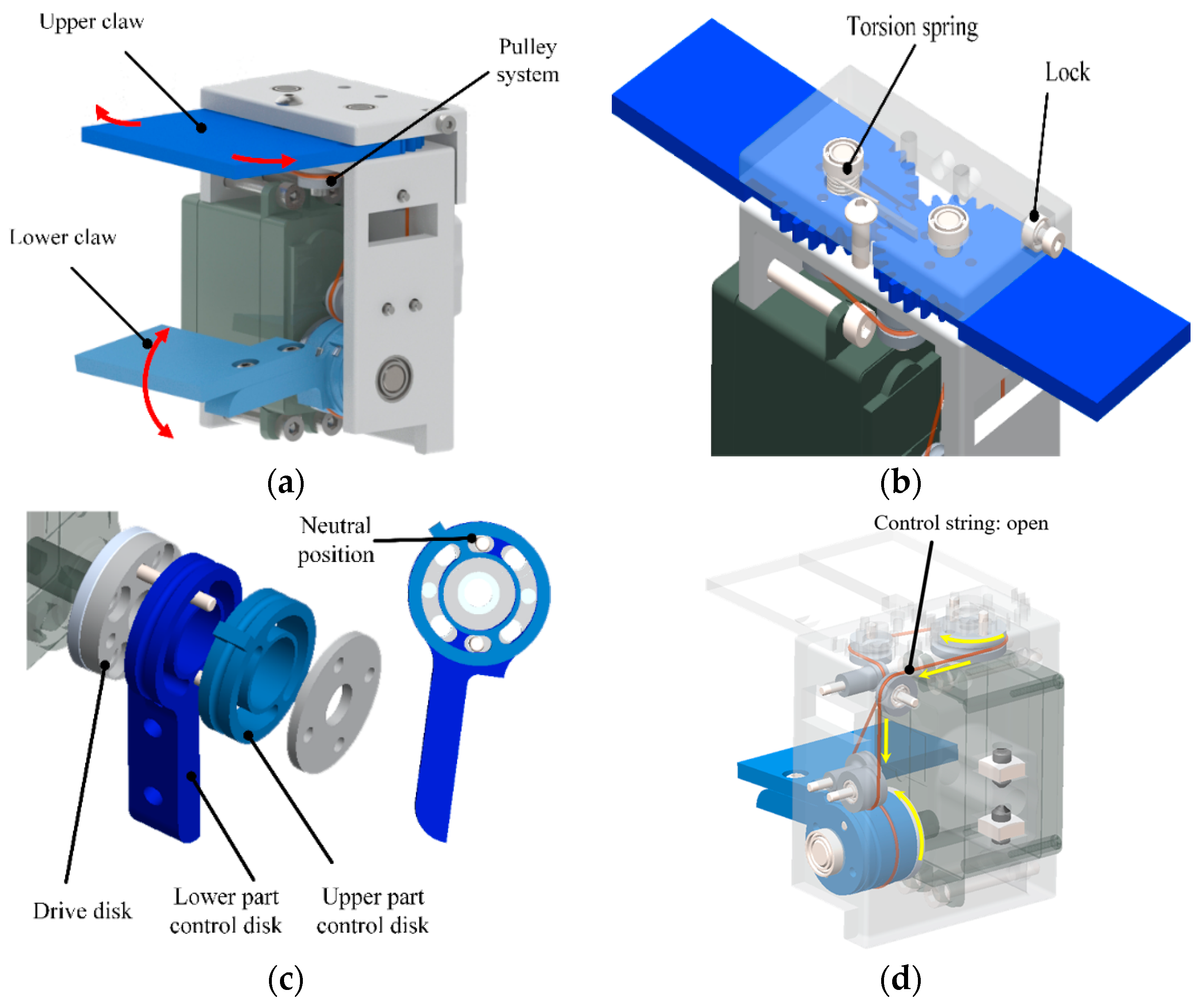
Design and demonstration of human climbing grippers. (a) The CAD model
4.6 (290) · $ 29.50 · In stock

Design and development of adjustable stair climbing robot

Robotic Gripper Mechanism Concept, 3D CAD Model Library

A schematic view of the flexible DSSC. b Photocurrent

Xiaosong Li's research works Tsinghua University, Beijing (TH) and other places

Li LVZHOU, Tsinghua University, Beijing, TH, Department of Mechanical Engineering
Sensors, Free Full-Text

Sensors, Free Full-Text

PDF) Robust scalable reversible strong adhesion by gecko-inspired composite design
PDF) Robust scalable reversible strong adhesion by gecko-inspired composite design

Rob Scharff's Soft Robotics hand responds to a human grip

PDF) Robust scalable reversible strong adhesion by gecko-inspired composite design
Sensors, Free Full-Text
Demonstration of gecko-inspired four-legged robot climbing on an

CAD model showing the overall gripper structure and components. Finger







